
 Image 1 of 5
Image 1 of 5
 Image 2 of 5
Image 2 of 5
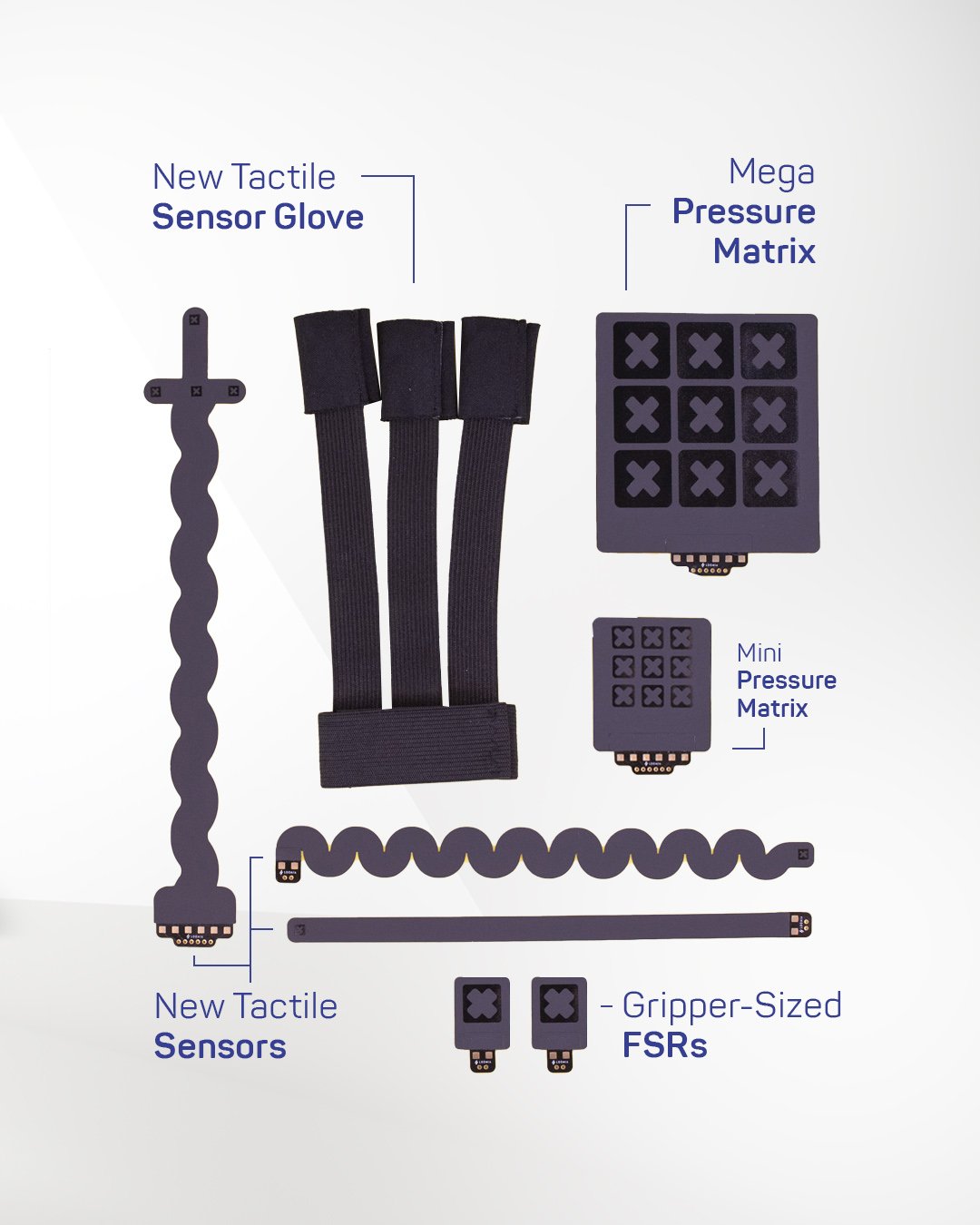 Image 3 of 5
Image 3 of 5
 Image 4 of 5
Image 4 of 5
 Image 5 of 5
Image 5 of 5
Start Tactile Sensing in Under 10 Minutes
Here’s What the Kit Includes
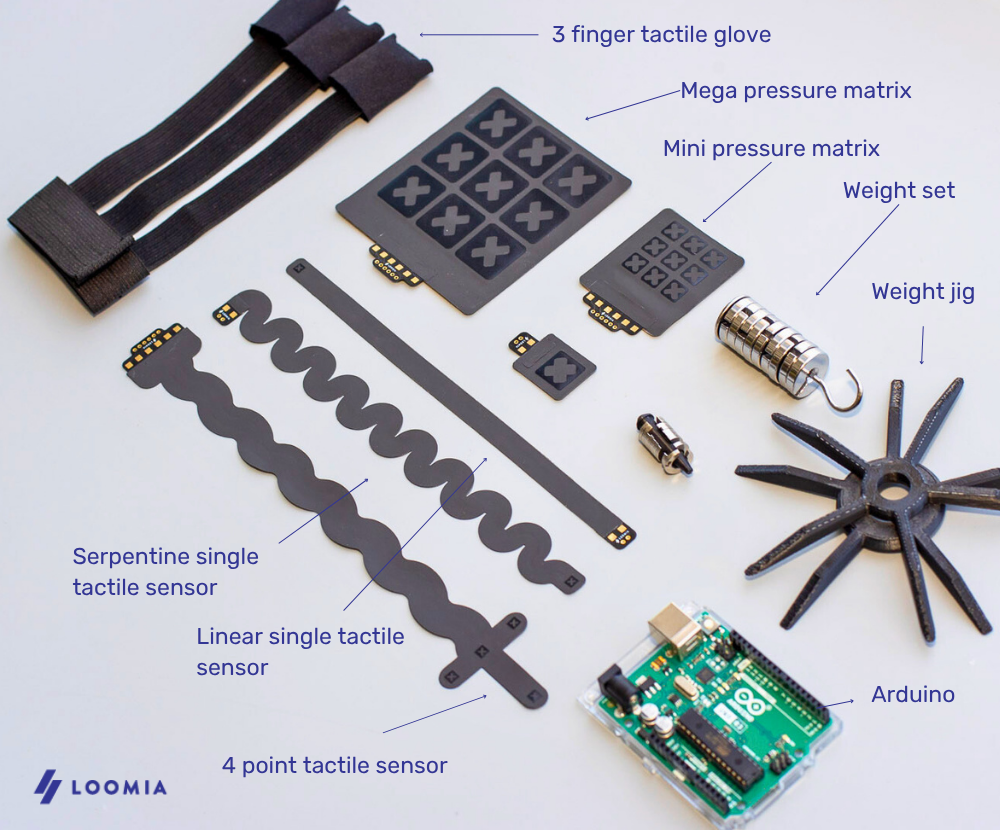
Pressure glove (3 fingers)
2 tactile sensors
2 mini pressure matrices
2 mega pressure matrices
2 single pressure sensors
* 1 peel-and-stick, 1 regular of each sensor included
Static weight testing kit
Alligator clip to breadboard headers
Arduino
User Manual
Software Download (Arduino, Python and Visualizer)
2 Hours of video call customer support
Our History of Tactile Sensing
Smart Skin is not a lab prototype. It’s a refined, tested product based on years of R&D and multiple real-world deployments.
Loomia has been developing flexible tactile sensors since 2018, when it built a glove-based pressure matrix for industrial automation leader Festo to enable a robotic hand to handle soft items like apples and fabrics.
Selected by a Fortune 50 company for a 1,000+ unit rollout in a next-generation device program that requires custom sensor formats in nontraditional geometries and sensitivity ranges.
Recently issued Loomia’s 8th patent covering tactile sensing architecture and integration.
This work establishes Smart Skin as a commercially ready sensing platform—field-proven, manufacturable, and available now.
Built for Real-World Humanoid Robotics
Developed using Loomia’s patented Electronic Layer (LEL), Smart Skin delivers a lightweight, flexible sensing platform designed to integrate with curved, moving, and high-friction surfaces.
Unlike rigid sensors that struggle with real-world geometries, Smart Skin was created specifically for high-motion, complex areas. It enables:
Precise grip control for delicate objects
Fine manipulation for dexterous tasks
Surface-level intelligence for responsive interaction
It is also silver-free and materially optimized to reduce the carbon footprint typically associated with advanced electronic systems.
Informed by Engineers
The Smart Skin kit is the result of insights gathered from over 100 interviews conducted through the NSF I-Corps program, where LOOMIA engaged with roboticists working in humanoid platforms, automation, and medical devices.
While computer vision and AI continue to advance rapidly, Loomia’s research revealed that tactile sensing remains a physical bottleneck in robotics. The team also discovered that pressure sensing was the missing piece in robotic hands and grippers, and that there just weren’t robust, flexible, plug-and-play solutions on the market
Loomia’s Two Sensor Technologies
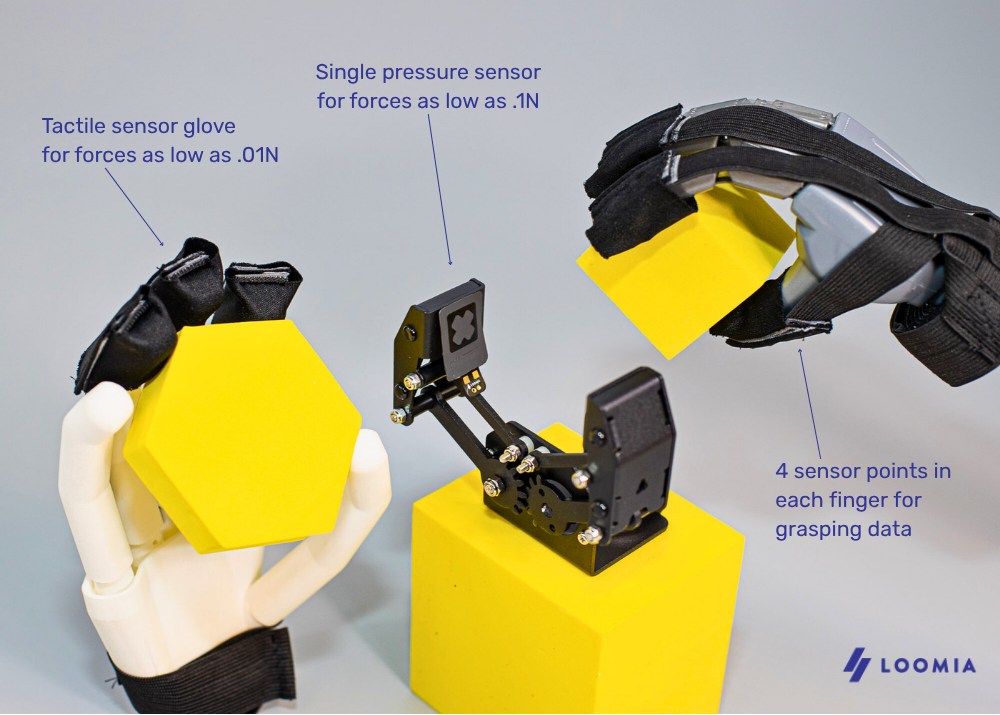
With the launch of this tactile sensing kit, Loomia is introducing a new, capacitive sensor that can detect touches as low as 1g or 0.01N. This new sensor technology will come in our tactile sensor glove and shows less than 1% drift over time. Our kit will also include an updated version of our resistive sensors, which are ideal for grippers, feet, palms and more. Data comparing our resistive and capacitive sensors are outlined below.
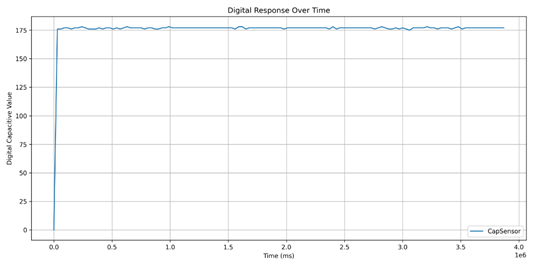
New “Smart Skin” capacitive sensors show low drift - less than 1% over the course of an hour under a 50g weight
| Specification | Capacitive | Resistive |
|---|---|---|
| Minimum Force | 0.01N | 0.1N |
| Max Force | 1.0N | Evaluated for 5N (may go higher) |
| Minimum Feature Size | 2.5 mm | 2.5 mm |
| Thickness | 1 mm | 0.5 mm |
| Drift | 0.55% over 1 hour | 11.16% over 1 hour |
| Hysteresis | Coming Soon | 21.8% over 50 cycles |
| Software Support | Arduino + Python Scripts | Visualization, Arduino + Python Scripts |
| IP Rating | Internal tests show minimal ingress | Internal tests show minimal ingress |
| Dataspeed | 100 Hz | 10 Hz |
| Performance Temperature Range | Coming Soon | Coming Soon |
| Sensor to Sensor Variability | 6.4% | 103% |
| Scalability | Up to 20,000 units a week 8 week lead time needed |
Up to 20,000 units a week 8 week lead time needed |
| Performance Details | Small feature size allows strong performance over curved surfaces. Uses a flexible active layer and is ideal for very low forces. Cannot yet be matrixed. | Best to use over slightly curved or flat surfaces. Will saturate over high curvature. Uses a slightly rigid active layer (similar to paper). Ideal for matrixed designs. |